WikiMath
This is Wordpress NewsPaper Theme converted to PmWiki
Traitement Des Images
Réduction d'une image
- Réduire une image revient à réduire la résolution de l'image
- n fois moins de pixels en hauteur et en largeur => résolution n fois plus grossière;
- 1 pixel de l'image réduite correspond à un bloc de n x n pixels dans l'image
à résolution fine. - Méthode de réduction la plus commune
- Découpage de l'image originelle en blocs de n x n pixels;
- calcul sur chaque bloc de la moyenne des intensités;
- l'intensité moyenne d'un bloc est l'intensité du pixel correspondant au bloc
dans l'image réduite. - Illustration de la réduction (5122 en 2562 - 1282 - 642)
 |  |  |
|---|
Agrandissement d'une image
- Agrandir une image revient à augmenter la taille des pixels
- n fois plus de pixels en hauteur et en largeur => pixels n fois plus grands
=> résolution n fois plus grossière. - Méthode d'agrandissement la plus commune
- Chaque pixel de l'image originelle est remplacé par un bloc de n x n pixels
de même intensité.- Procédé d'interpolation au plus proche voisin.
- Effet de crénelage des contours obliques et de brouillage
- Augmente avec le facteur d'agrandissement.
- Pixelisation rendant méconnaissables beaucoup de détails.
- Atténuation
- Par application dans chaque bloc d'une :
- interpolation bilinéaire;
Variation linéaire des intensités dans chaque direction.- interpolation par splines
Transition liss de niveaux de gris entre carrés voisins - Par l'utilisation de techniques de lissage spécifiques.
- Par application dans chaque bloc d'une :
Rééchantillonnage d'une image
- Rééchantillonner c'est modifier le nombre de pixels
- Sous-échantillonnage => réduction
- suppression de pixels
- Sur-échantillonnage => augmentation
- ajout de pixels par interpolation
- Sous-échantillonnage => réduction
- Le redimensionnement d'une image consiste donc en un rééchantillonnage
- Un rééchantillonnage peut détériorer la qualité et la netteté
- Importance du choix de la méthode d'interpolation
- plus proche voisin : rapide, mais la moins précise;
- bilinéaire : qualité moyenne (calcul sur 4 pixels);
- bicubique : lente, mais la plus précise (analyse de 16 pixels).
- Importance du choix de la méthode d'interpolation
Transformation rigide
Qu'est-ce qu'une transformation rigide
- Combinaison d'une rotation et d'une translation.
- Transformation définie par un vecteur de paramètres $\Theta$
$\Theta=\left(t_x,t_y,\theta_z\right)^T$,
- $t_x$ décrit la translation en $x$;
- $t_y$ décrit la translation en $y$;
- $\theta_z$ spécifie l'angle de rotation par rapport à $z$.
- Repère orthonormé direct

Formulation de la transformation - rotation discrète
- Soient
- $S=\left(x,y\right)^T$ un pixel de l'image de départ;
- $S'=\left(x',y'\right)^T$ son image par la transformation dans l'image d'arrivée
$S'=T_{\Theta}(S)$.
- Formulation
$\left(\begin{array}{c} x' \\ y' \end{array}\right) = \left[\left(\begin{array}{cc} \cos \theta_z & \sin \theta_z \\ -\sin \theta_z & \cos \theta_z \end{array}\right) \times \left(\begin{array}{c} x \\ y \end{array}\right)\right] + \left(\begin{array}{c} t_x \\ t_z \end{array}\right)$
- Inconvénients
- Non bijective.
- Non surjective (image d'arrivée avec des trous).
- Solution
- Pour obtenir la couleur du pixel $S'$ on calcul son antécédent $S$.
- Parcours de l'image d'arrivée et non de l'image de départ
- Illustration
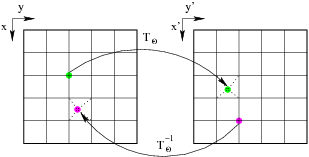
Formulation de la transformation - rotation discrète inverse
- Soient
- $S=\left(x,y\right)^T$ un pixel de l'image de départ;
- $S'=\left(x',y'\right)^T$ son image par la transformation dans l'image d'arrivée
$S=T_{\Theta}^{-1}(S')$.
- Formulation
$\left(\begin{array}{c} x \\ y \end{array}\right) = \left[\left(\begin{array}{cc} \cos \theta_z & -\sin \theta_z \\ \sin \theta_z & \cos \theta_z \end{array}\right) \times \left(\begin{array}{c} x'-t_x \\ y'-t_y \end{array}\right)\right] + \left(\begin{array}{c} \frac{1}{2} \\ \frac{1}{2} \end{array}\right)$
- Avantage
- Evite le problème de la non surjectivité de la rotation.
- Remarque
- Ajout de $\left(\frac{1}{2},\frac{1}{2}\right)^T$ => troncature vers le plus proche voisin.
Interpolation bilinéaire
- Rappel sur l'interpolation linéaire
- Soit $c \in [a;b] \in R$ avec $f(c)$ non calculable;
- on remplace $f$ sur $\left[a;b\right]$ par le segment $\left[AB\right]$
$f(c) \approx f(a)+(c-a) \times \frac{f(b)-f(a)}{b-a}$

- Soient $(x,y),(x,y+1),(x+1,y)$ et $(x+1,y+1)$ 4~points du plan 2D pour
- Principe de calcul de l'image de $c \in \left[x;x+1\right] \times \left[y;y+1\right]
- Calcul par interpolation linéaire de $f(c')$ et $f(c'')$
- $f(c')=f(x,y)+\Delta y \times (f(x,y+1)-f(x,y))$
- $f(c'')=f(x+1,y)+\Delta y \times (f(x+1,y+1)-f(x+1,y))$
- Calcul par interpolation linéaire de $f(c)$
- $f(c)=f(c')+\Delta x \times (f(c'')-f(c'))$
Remarque- $c=(x+\Delta x,y+\Delta y), c'=(x,y+\Delta y), c''=(x+1,y+\Deltay)$
- Calcul par interpolation linéaire de $f(c')$ et $f(c'')$

Matrices de transformation
- Passage des coordonnées classiques en coordonnées homogènes
$\left(\begin{array}{c} x \\ y \end{array}\right) = \left(\begin{array}{c} x' \\ y' \\ z' \\ \end{array}\right)$
- Transformations élémentaires définies par une matrice
$\begin{array}{ccc} Identité & Rotation & Translation \\ \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right) & \left(\begin{array}{ccc} \cos \theta_z & \sin \theta_z & 0 \\ -\sin \theta_z & \cos \theta_z & 0 \\ 0 & 1 &0 \end{array}\right) & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ t_x & t_y & 1 \end{array}\right) \\ \end{array}$
- Algorithme de transformation matricielle
- Multiplication de matrices de transformations élémentaires.
- Inversion de la matrice résultante (utilisation de Gauss-Jordan).
- Balayage des pixels de l'image d'arrivée en multipliant à chaque fois
sa position par la matrice inverse.
Travaux pratiques
- Mettre en oeuvre la transformation rigide en utilisant les deux formulations :
- rotation discrète;
- rotation discrète inverse.
- Utiliser comme centre de la transformation le milieu de l'image et non l'origine comme dans c'est le cas dans les formules données . Vous devrez donc légèrement modifier les formules.
- Constater que dans le premier cas on obtient un image transformée avec des trous, alors que dans le second cas l'image est correcte.
- Remarques
- Lorsque vous aurez besoin du niveau de gris d'un pixel en dehors de l'image à transformer, vous utiliserez le noir (RGB = (0,0,0)).
- Les deux formules font une interpolation de type plus proche voisin. On aurait pu cependant utiliser une interpolation bilinéaire.
- Illustration de la transformation rigide de centre (100,100), de vecteur translation (10,10) et d'angle 20 degrés.
| Image d'origine | Transf. rotation disc. |
 | 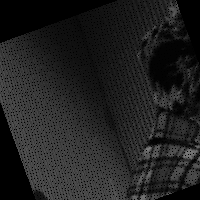 |
| Image d'origine | Transf. rotation disc. inverse |
| 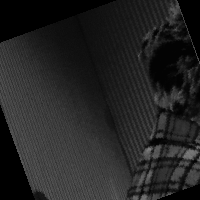 |